
CUBEtronics Robot
Self-Balancing Cube Robot and Dual Axis Reaction Wheel Inverted Pendulum
Project Lead
Assoc. Prof. Dr. Eng. Amir R. Ali
Project Members

Dalia Mamdouh, B.Sc. (2017)
Brief description for the project:
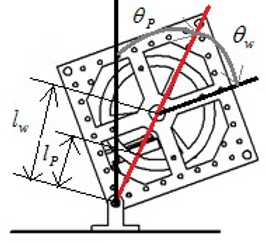
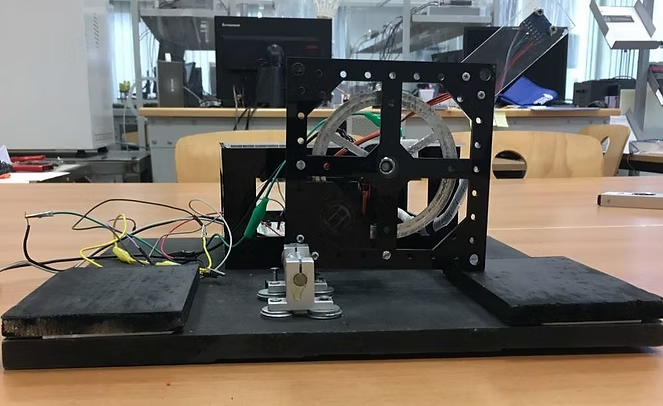
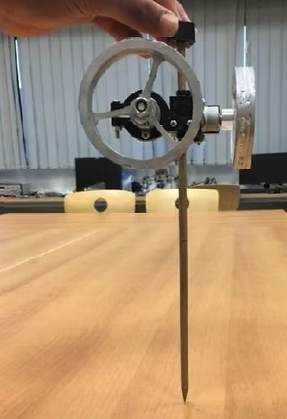
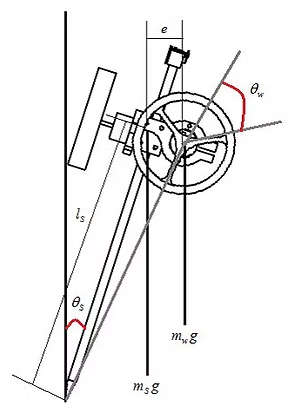
Several years ago, a multitude of people around the globe were overwhelmed by the field of robotics. One of the most important types of robots is the self balancing robot which is considered to be a great development in the robotics field. A self balancing robot is based on the concept of the inverted pendulum which makes this type of robots pick up distinction and enthusiasm among researchers and engineers due to the importance of the control behind inverted pendulums that is used to stabilize unstable systems. However, one of the drawbacks of using inverted pendulums in the self balancing robots is the disability to achieve some of the required movements of the robots due to the lack of the angular momentum needed to maintain the balance and movements of the robot. As a result, the reaction wheel inverted pendulum was proposed by replacing the point mass of the pendulum by a spinning massive disc attached to a motor, and so the reaction torque provided by the angular acceleration of the disc can be sufficient to control and balance the system. The aim of this dissertation is to validate the concept of reaction wheel inverted pendulum in balancing some robotic systems. As a result, two types of reaction wheel inverted pendulum self balancing robots were introduced by design and fabrication of a 3D cubic structured system (Cubli), along with a 1D prototype that is expected to jump up using external impact force and to balance in an upright position, and a self balancing stick that is capable to balance on its tip. The 1D Cubli prototype and a 2D representation of the self-balancing stick were modeled using Lagrangian Formulation to be able to obtain the equations of motion for each system. A successful Jump-Up maneuver was simulated and tested for the two Cubli prototypes. Sensor calibration was performed to be able to obtain a closed-loop form for the 1D Cubli prototype to be controlled. Two types of linear feedback controls were simulated for the 1D Cubli prototype which are the Proportional-Integral-Differential control (PID) and the Full State Feedback control (FSF). The results proved positive in the simulation for both controllers for their linearity. However, these control laws were not yet implemented practically to observe the difference.

Challenges of the project:
The interest to approve the concept of the reaction wheel inverted pendulums in self balancing systems as well as the passion to learn how to control and stabilize one of the most challenging systems to control due to its non-linear and open-loop unstable properties had driven me to choose this topic as part of my bachelor degree in machatronics engineering. Nowadays, self balancing robots are considered to be a great development in the robotics field; as they are used in a myriad of applications as an autonomous way of transportation, search and rescue robots, humanoid robots, balancing tool for people having balancing disorder, satellite ships, or even a learning robot to teach students the interesting dynamics and control of these robotic systems. The main concern of this thesis is to build self-balancing systems that could be used in some of these applications to validate the concept of the reaction wheel inverted pendulum and its ability to be stabilized using linear control approaches which are the Full-State Feedback and the Proportional-Integral-Derivative Control.